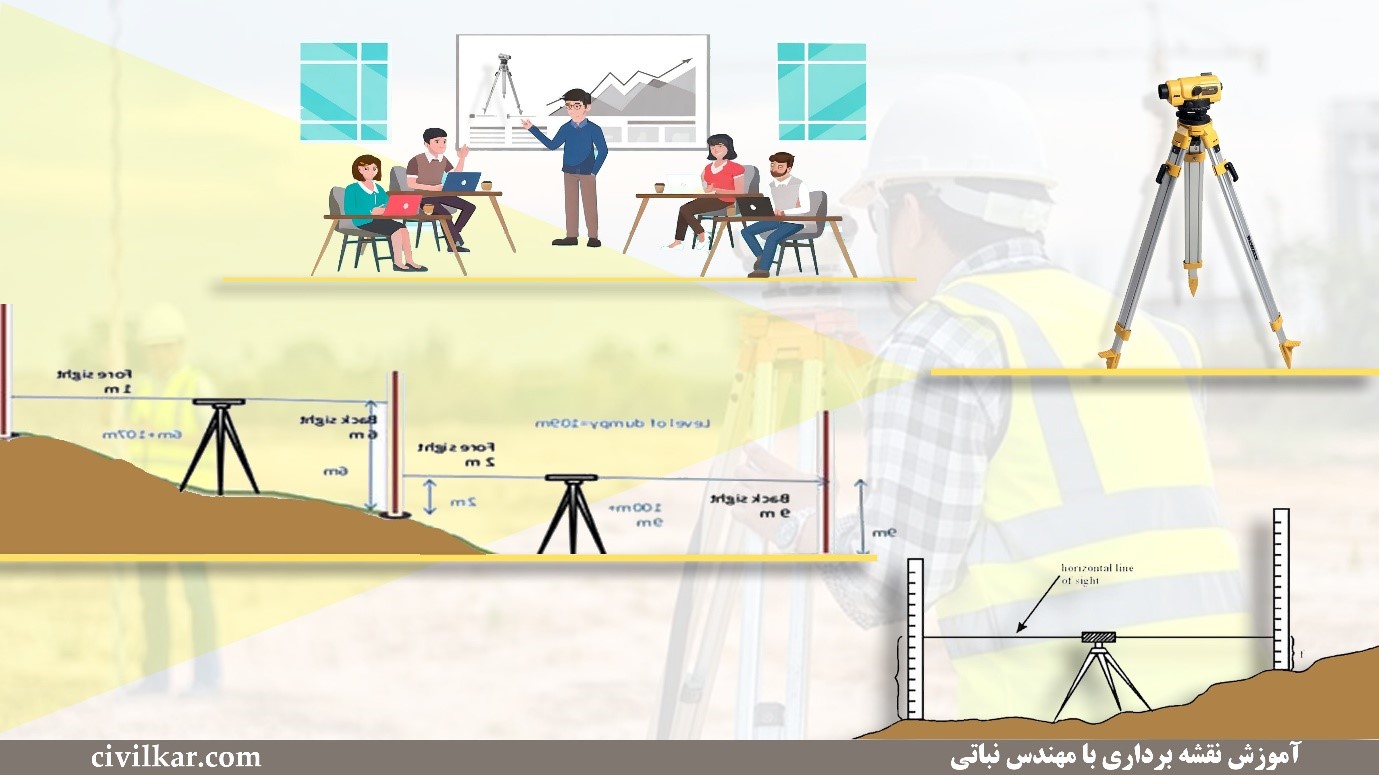
ترازیابی در مهندسی نقشهبرداری



کسب درآمد از مهندسی (بیزینس مهندسی)
در این آموزش شما با روش های تبلیغات موثر با هزینه پایین والبته بازدهی سریع ویژه مهندسی عمران،معماری و نقشه برداری آشنا خواهید شد.

آموزش جامع نقشه برداری (صفر تا صد)
دوره جامع صفرتا صد نقشه برداری زمینی این دوره برای چه کسانی مناسب است؟ تمامی دانشجویان و فارغ التحصیلان رشته…

دوره آموزش نرم افزار civil3d
آموزش نرم افزار CIVIL3D ویژه نقشه برداری،با درنظر گرفتن جزئیات اجرایی مورد نیاز در پروژه ها بصورت تضمینی
پلاگین شیت بندی اتوماتیک نقشه برداری UTMP
این پلاگین ویژه رشته نقشه برداری برای افزایش کیفیت نقشه ها و خروجی اتوماتیک نقشه است .این پلاگین در کنار…

دوره آموزش نقشه برداری با دوربین توتال استیشن و جی پی اس
آموزش پروژه محور نقشه برداری با دوربین توتال استیشن سندینگ و لایکا +آموزش گیرنده مولتی فرکانس (جی پی اس)

دوره مبانی نقشه برداری
در این آموزش با اصول اولیه و اصلی نقشه برداری آشنا خواهید شد،دقیقا در نقشه برداری دنبال چه چیزی هستیم؟
نقشه برداری بدون وابستگی به تجهیزات و صرفا با یک متر، نخ ریسمان و …

آموزش نقشه برداری با جی پی اس مولتی فرکانس
در این آموزش در کوتاه ترین مدت زمان بصورت کامل با سامانه های ماهواره gnss آشنا خواهید شد و میتوانید پروژه های خود را با گیرنده مولتی فرکانس بصورت کاملا اجرایی به اجرا رسانید.

آموزش جامع ترازیابی (دوربین نیوو)
در این دوره بصورت کامل ترزایابی را بصورت اجرایی با روش های کامل یا خواهید گرفت در پروژه های ساختمانی،راهسازی خط انتقال لوله و…

آموزش نقشه برداری نمای ساختمان
آموزش نقشه برداری نما ساختمان با دوربین توتال استیشن بصورت کاملا پروژه محور

آموزش گوگل ارث ویژه نقشه برداری
بصورت تخصصی به کاربرد نرم افزار گوگل ارث در نقشه برداری پرداخته شده است و با حضور در پروژه های واقعی کاربرد این نرم افزار آموزش داده شده است

دورره آموزشی تخصصی تفکیک آپارتمان
این آموزش در مرحله پیش فروش بوده و از هفته اول اسفند ماه آموزش ها اضافه خواهد گردید. دوره آموزش…

پروژه راهسازی با نرم افزار civil3d
در این آموزش برای اولین با در کشور روش طراحی یک پروژه راهسازی مطابق با نشریه 800(آیین نامه آرا) آموزش داده شده است که کارآموز بعد از گذراندن این آموزش توانایی طراحی یک پروژه راهسازی مطابق با آیین نامه آرا را بدست می آورد
مطالب زیر را حتما مطالعه کنید

ثبت نام در سامانه شمیم + ویدیو

ثبت نام در سامانه هدی پرو + ویدیو

نقشه برداری منابع طبیعی

نقشه برداری طرح هادی

نقشه برداری صنعتی

دیدگاهتان را بنویسید